新一代信息技術(shù)
基于Q學(xué)習(xí)遺傳算法的智能電動(dòng)汽車(chē)路徑跟蹤控制方法
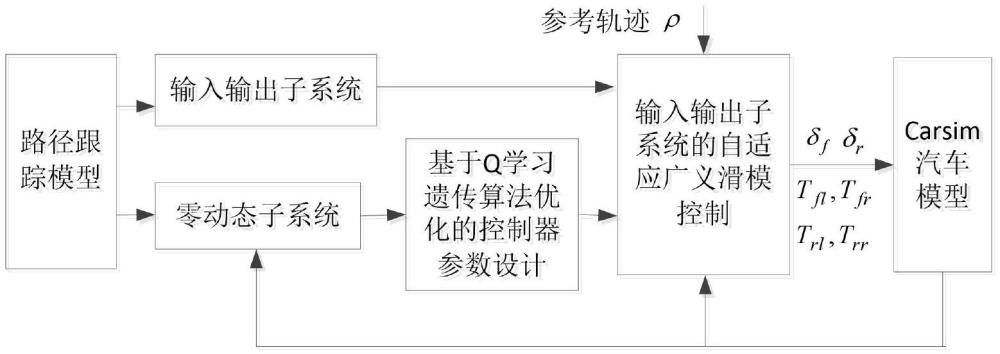
基于Q學(xué)習(xí)遺傳算法的智能電動(dòng)汽車(chē)路徑跟蹤控制方法涉及智能電動(dòng)汽車(chē)路徑跟蹤控制領(lǐng)域����,其首先根據(jù)車(chē)輛的動(dòng)力學(xué)運(yùn)動(dòng)機(jī)理建立路徑跟蹤模型;然后考慮四個(gè)車(chē)輪的滑轉(zhuǎn)狀態(tài)�����、軌跡跟蹤誤差及橫擺穩(wěn)定性,重新定義路徑跟蹤系統(tǒng)的輸出���,通過(guò)輸入輸出線性化將路徑跟蹤系統(tǒng)分解輸入輸出子系統(tǒng)和零動(dòng)態(tài)子系統(tǒng)��;對(duì)輸入輸出子系統(tǒng)提出自適應(yīng)廣義滑?���?刂品椒?�,使輸入輸出子系統(tǒng)的狀態(tài)快速跟隨其理想值����;通過(guò)穩(wěn)定性分析獲取零動(dòng)態(tài)子系統(tǒng)穩(wěn)定的條件,并在此基礎(chǔ)上提出基于Q學(xué)習(xí)遺傳算法優(yōu)化的控制器參數(shù)設(shè)計(jì)方法�����,以實(shí)現(xiàn)智能電動(dòng)汽車(chē)路徑跟蹤控制系統(tǒng)在平衡點(diǎn)附近的漸近穩(wěn)定��。本發(fā)明有效提高了智能電動(dòng)汽車(chē)的路徑跟蹤能力����,保證其在極限工況下的動(dòng)力學(xué)穩(wěn)定性��。
吉林大學(xué)
授權(quán)發(fā)明