新一代信息技術(shù)
一種基于動態(tài)規(guī)劃的模塊化機械臂多故障容錯控制方法
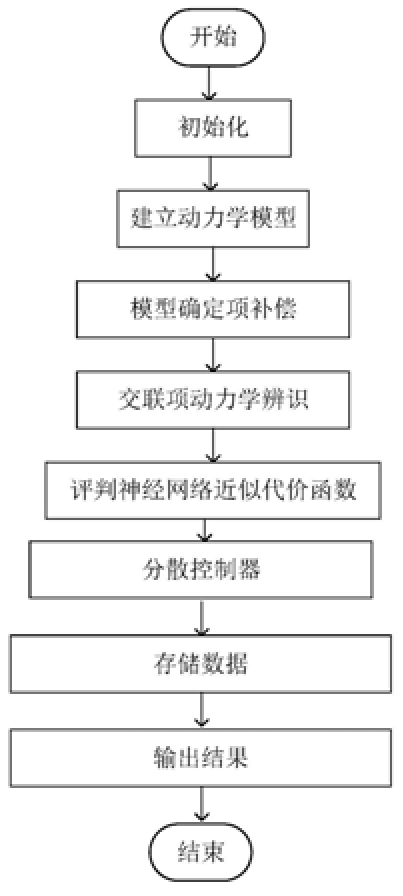
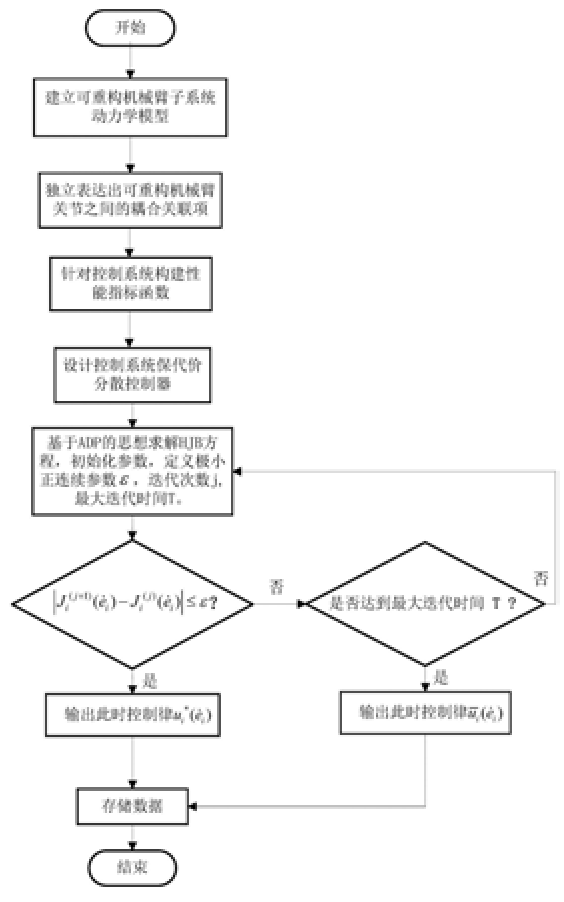
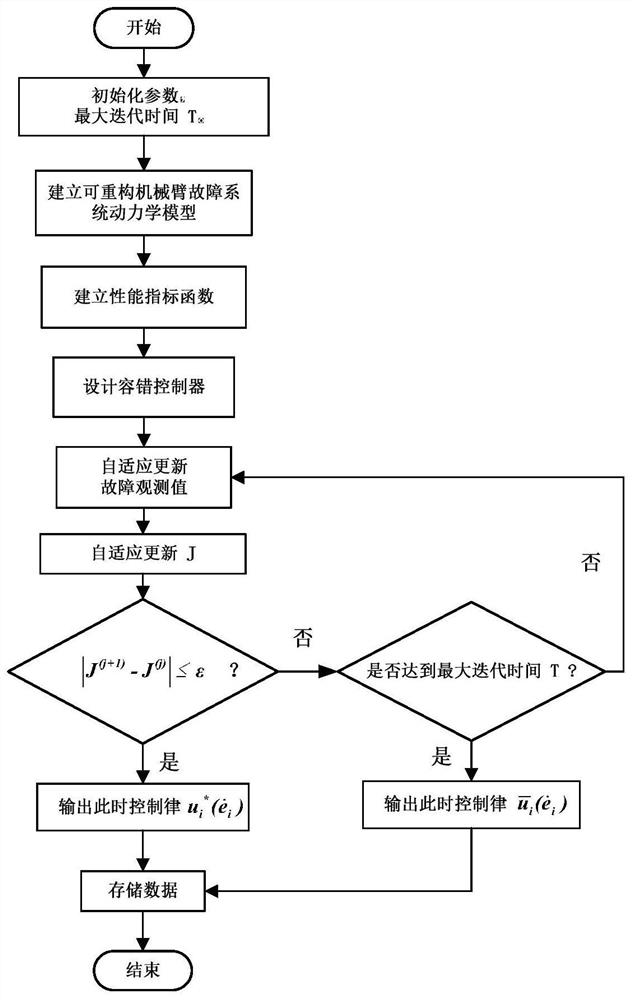
本發(fā)明公開了一種基于自適應動態(tài)規(guī)劃的可重構(gòu)機械臂多故障容錯控制方法�,構(gòu)建可重構(gòu)機械臂系統(tǒng)的動力學模型及多故障動力學模型;根據(jù)多故障動力學模型�,給出性能指標函數(shù)����;設計自適應故障觀測器,對系統(tǒng)故障進行故障估計�;構(gòu)建評價網(wǎng)絡,利用神經(jīng)網(wǎng)絡近似估計性能指標函數(shù)�;完成最優(yōu)容錯控制器的設計。本發(fā)明方法具有控制結(jié)構(gòu)簡單緊湊��、減小控制過程計算量等優(yōu)點����。
長春工業(yè)大學
授權(quán)發(fā)明